

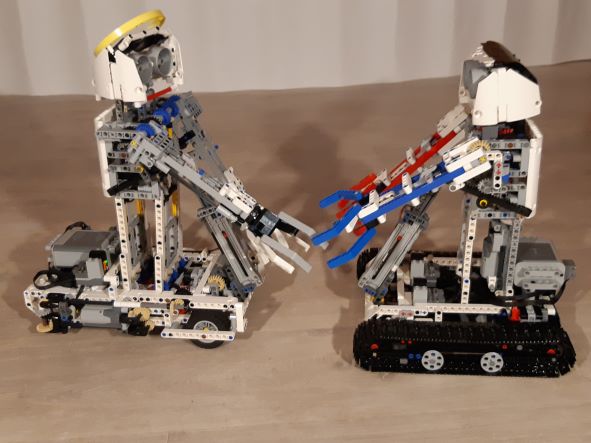
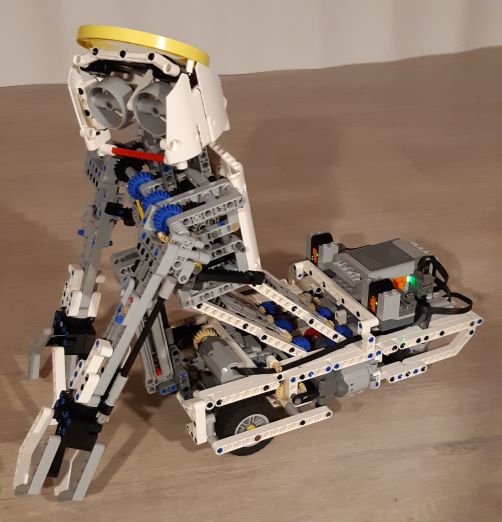
L’aspect est volontairement décharné, ce sont des robots.
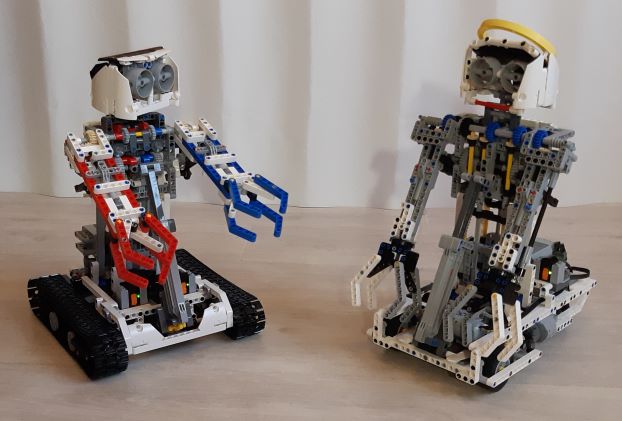
Première version : environ 1100 pièces
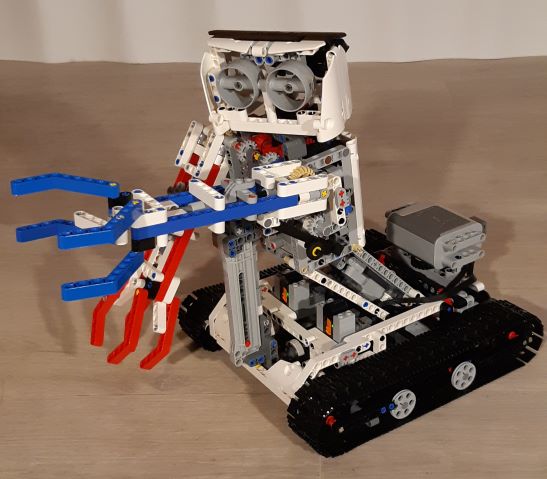
Deux moteurs L sont liés via les commutateurs A et B soit les deux chenilles (mode route) soit à un bras et une pince (mode robot).
Le moteur M1 relie les deux moteurs L en mode robot soit vers le bras droit soit vers le bras gauche (commutateurs C et D) et tourne la tête vers le bras actif (avec limiteur de couple).
Le moteur M2 penche/relève le torse (avec limiteur de couple). Lorsque le torse est complètement levé le moteur M1 est relié par frottement entre deux pneus vers les commutateurs A et B à travers une vis sans fin et deux leviers, sans blocage.
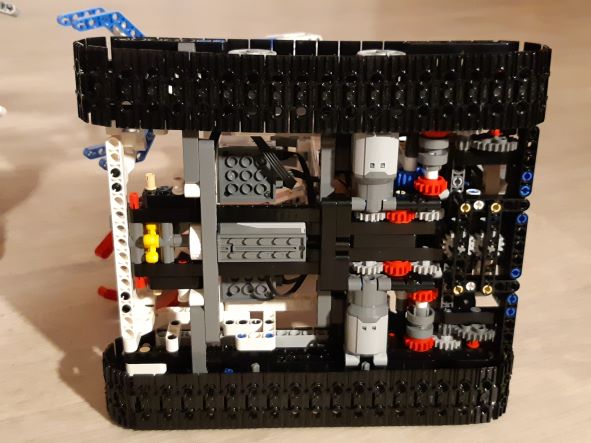
Le torse reçoit les moteurs à travers trois cardans.
Et un résumé du mode robot :
- Position de la tête OK. Un bras est actif, l’autre inactif.
- Ouverture/fermeture d’une pince OK (le mini LA gère les butées)
- Position du bras OK mais sans limiteur de couple, il est possible de forcer le bras en position haute ou basse (je cherche encore une solution).
- Position du torse OK
A l’usage voici un résumé du mode route :
- Position de la tête le basculement droite/gauche est rapide et la position centrale « vers la route » demande du doigté sur la télécommande. Les bras sont inactifs.
- Rotation des chenilles (sans limiteur de couple) OK, la vitesse est suffisante et il est possible de limiter le glissement avec des blocs 24375.
- Position du torse OK
Le basculement entre les modes route et robot est un peu lent et il faut arrêter la commande au bon moment. De plus j’ignore la durée de vie des pneus de renvoie !

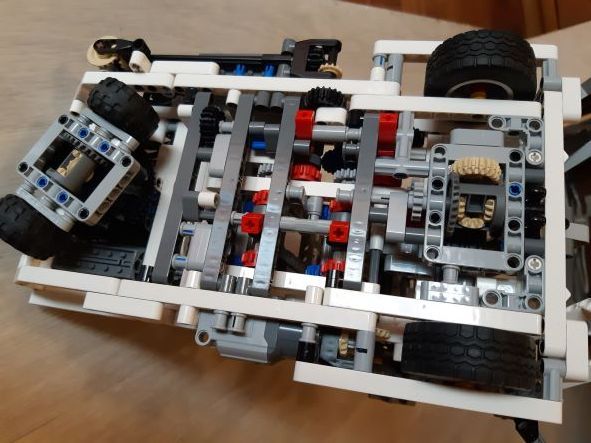
Seconde version : environ 1050 pièces
Un moteur L est lié via le commutateur A soit vers les roues arrières (mode route) soit vers une pince (mode robot).
Le moteur M1 est lié via le commutateur B soit vers la direction des roues (mode route) soit vers un bras (mode robot).
Le moteur M2 (avec limiteur de couple) relie les moteurs L et M1 en mode robot soit vers le bras droit soit vers le bras gauche (commutateurs C et D), tourne la tête vers le bras actif, et active les commutateurs A et B.
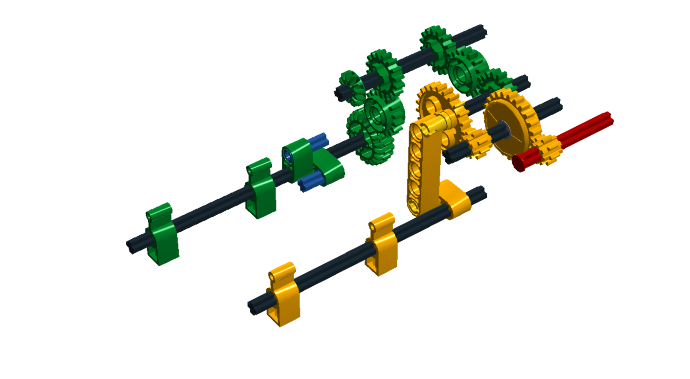
La ruse est de commuter deux fois C et D (couleur jaune) via des leviers, sans blocage puis d’activer A et B (couleur verte) en butée suivant le cycle :
droit/robot gauche/robot droit/robot gauche/neutre droit/route
droit/route gauche/route inutile droit/route inutile gauche/neutre droit/robot
Le moteur M3 penche/relève le torse. Lorsque le torse est en buté un différentiel renvoi la force vers la rotation des deux poignés du robot.
Le torse reçoit les six axes moteurs à travers six cardans.
A l’usage voici un résumé du mode robot :
- Position de la tête OK
Le nombre de basculement droite/gauche indique en théorie le mode choisi droite/gauche et robot/route. En pratique je suis rapidement paumé entre les modes.
- Ouverture/fermeture de la pince OK mais trop lent (le mini LA gère les butées)
- Position du bras OK mais sans limiteur de couple il est possible de forcer le bras en position haute ou basse (je cherche encore une solution).
- Position du torse et rotation des poignés OK
Bon … je sais … la rotation des poignés s’était vraiment pour le fun.
Et un résumé du mode route :
- Position de la tête OK
- Avance/recule (sans limiteur de couple) OK, la vitesse est suffisante.
- direction des roues sur 360 degrés (sans limiteur de couple) OK
J’ai choisi une rotation sur 360 degrés afin d’obtenir un déplacement latéral rapide, mais en pratique je suis rapidement paumé sur la direction du robot.
- Position du torse et rotation des poignés OK
Je suis assez satisfait de ces deux MOC. Qu'en pensez-vous ?



