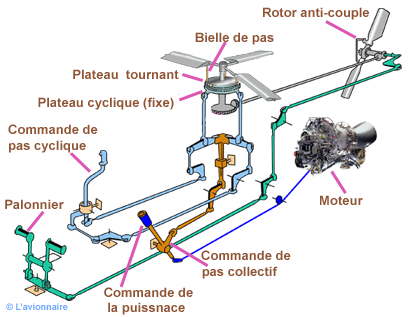
J'avais envie de partager avec vous le projet sur lequel je travaille en ce moment : Un hélicoptère motorisé. La mécanique et les commandes de vol de ce type d'appareil m'a toujours impressionné et intrigué c'est pourquoi j'ai voulu tenter d'en reproduire la mécanique en Lego.
Nombreux sont passés avant moi comme Steph77, Jeroen ou encore Sheepo dans un autre style, j'ai l'avantage de ne pas partir de la feuille blanche !
Il s'agit d'un topic WIP, donc les montages que vous verrez ne sont pas définitifs. Je travaille énormément par briques technos indépendantes que je développe puis assemble avec les autres pour voir comment j'organise les éléments entre eux (entrées-sorties, liaisons, encombrement).
Le squelette sur lequel je m'appuie est celui de Jeroen ; https://rebrickable.com/mocs/MOC-56765/Jeroen%20Ottens/large-helicopter/#details. Ca m'aide à gérer rapidement les volumes limites et les proportions.
Mon cahier des charges :
- Echelle de l'hélico de Jeroen
- Commande de vol motorisées -> 4 moteurs (2cycliques, 1 lacet et 1 collectif)
- Système de HOG haptique -> (loi d'effort pour chaque axe et une friction pour le collectif)
- Trains rétractables -> 1 moteur
- 2 fonctions bonus non figées (pales rétractables et/ou treuil) -> 1 moteur + BV manuelle
- Design basé sur le H160 de AH.
D'un point de vue système j'aimerais mettre en place 3 modes de fonctionnement :
Fonction passive :
Les commandes de vol en fonction réagissent en fonction de l'inclinaison de helico -> gyroscopes Hub control+ ou Mindstorm (c'est une partie que je n'ai pas trop testé pour l'instant)
Fonction active :
Pilotage des commandes de vol par smartphone ou manette bluetooth type ps4
Fonction manuelle :
Pilotage commandes de vol manuellement par HOG + recopie au niveau du cockpit
Bon schématiquement ça donne un fonctionnement comme ça :
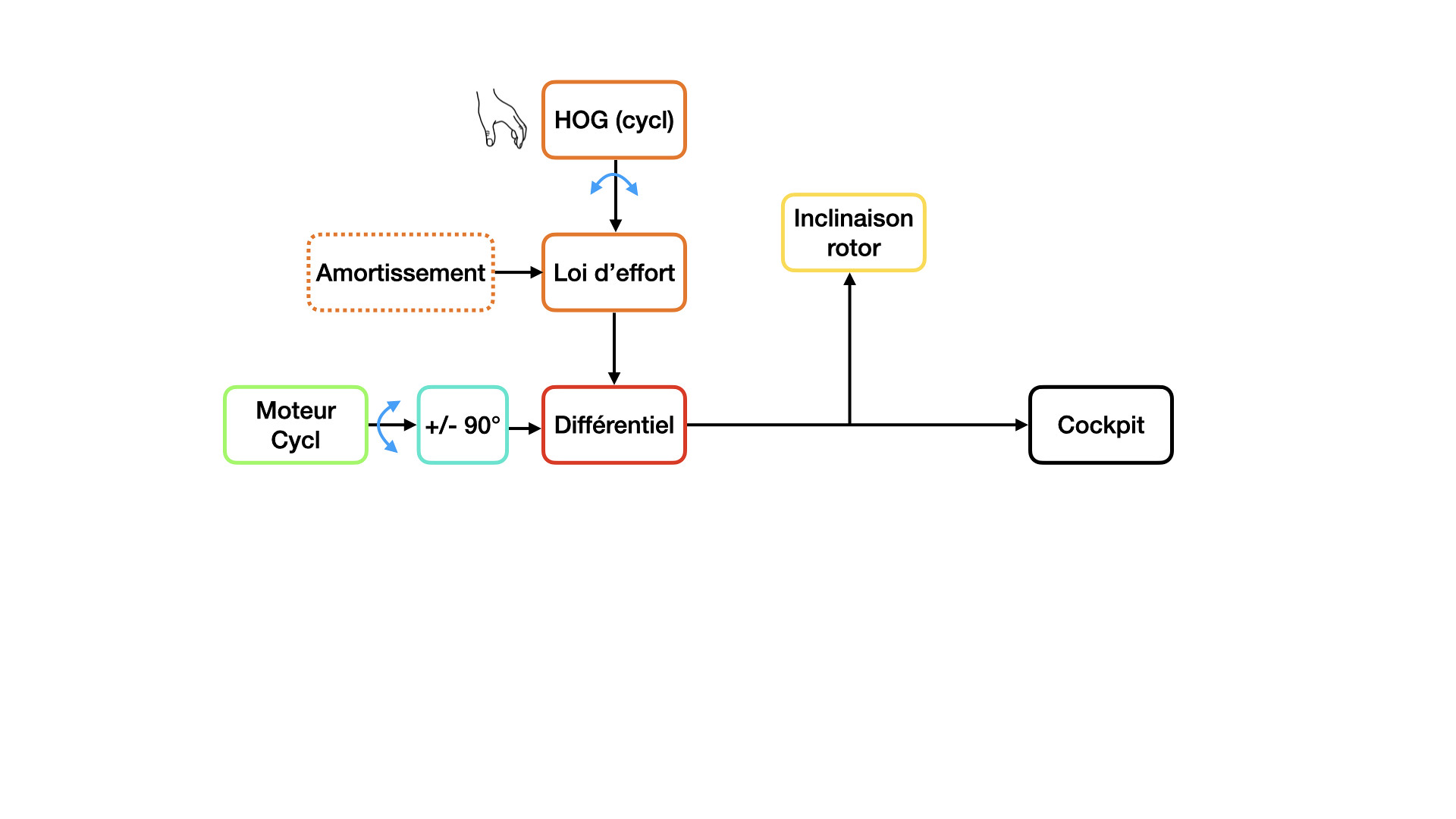
Il faut imaginer un fonctionnement analogue pour les 4 axes (sauf le collectif qui est plus complexe).
Le diff est très important : il permet de désaccoupler sans embrayage la partie moteur de la partie manuelle : ici le HOG. En effet si l'on active le moteur, alors la résistance qu'oppose la loi d'effort enverra la commande vers le rotor et le cockpit. La loi d'effort joue un double jeu : Sensation d'effort un niveau du manche du HOG comme dans les vrais hélicos et génératrice de couple résistif pour le diff.
Si en revanche l'on souhaite utiliser le HOG pour commander manuellement le rotor alors le moteur par sa réduction opposera suffisamment de couple pour le mouvement transite directement vers le rotor.
Il faut donc imaginer qu'il y a un diff pour chaque axe de vol soit 4 en tout !
En gros je préfère avoir une commande centrale (le HOG) maniable et ergonomique vers la queue de l'appareil pour commander l'ensemble des axes de l'hélico et qu'elles soient recopiées dans le cockpit plutôt que que d'avoir des commandes de vol dans le cockpit peu accessibles.
Bon je n'en suis qu'au début mais c'est déjà un beau bébé !
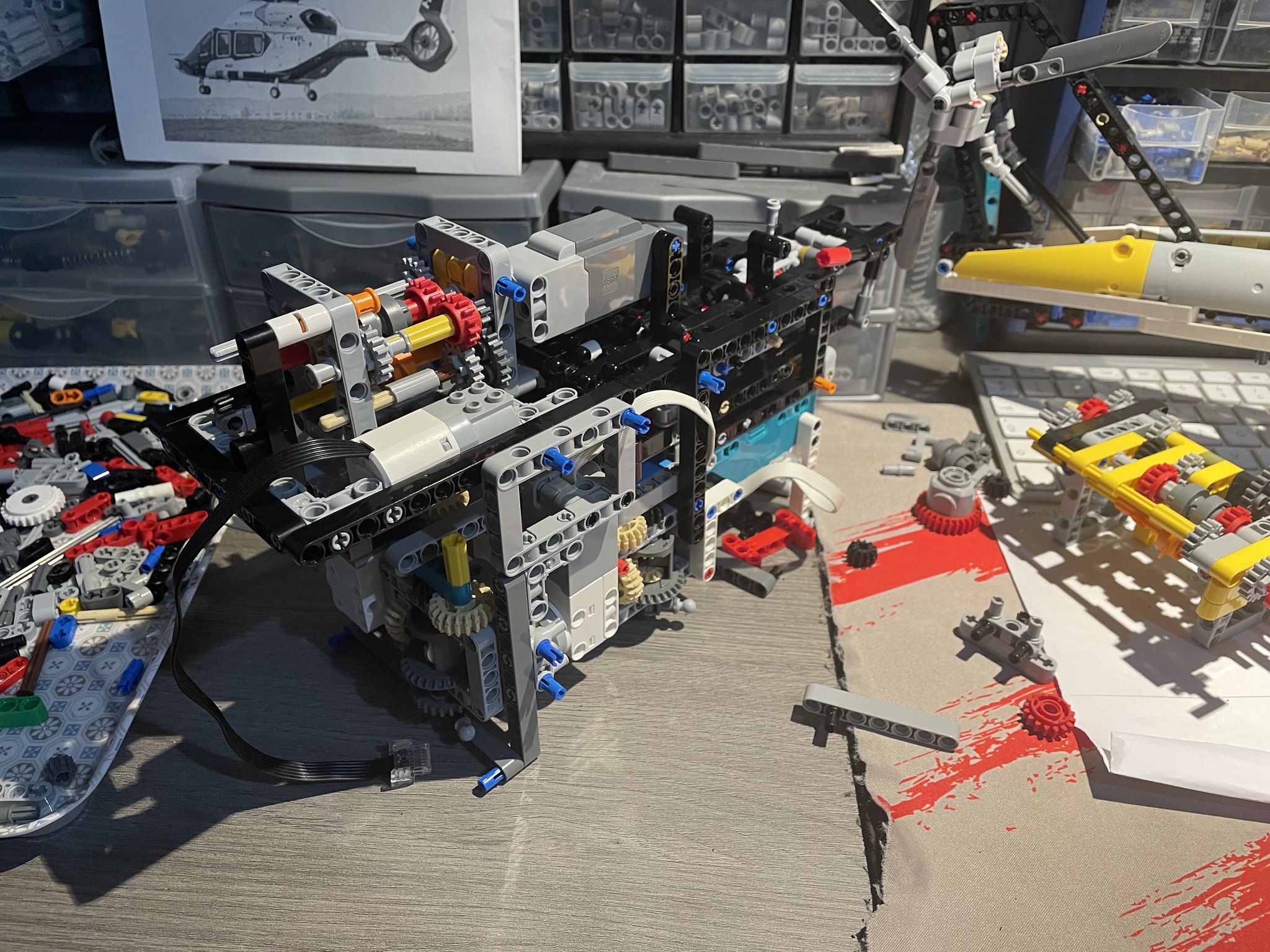
Ce que l'on voit c'est tout l'arrière de l'appareil juste avant la queue. J'ai réalisé l'ensemble des 4 axes motorisés + le HOG. Je suis entrain de concevoir la BV pour le rotor avec la liaison avec le collectif. Il me reste encore pleins de défis à relever !
A noter que la commande de collectif est reliée à une boite à vitesses qui augmente la vitesse de rotation du rotor en fonction du pas. (c'est la BV que l'on voit en haut à gauche).
Pour le moment je suis parti sur l'écosystème mindtorms que j'avais à ma disposition. J'ai vu que Lego vendu le même module mais version PU : https://www.lego.com/fr-fr/product/large-hub-88016. Le prix est abusé, je ne sais pas encore si je ferai la bascule vers le PU. En tout cas les dimensions sont le mêmes
.gif ":)")
N'hésitez si vous avez des questions. Je ne développe volontairement pas tout sinon le post ferai 30km de long;)
@+







.gif ";)")