

Bonjour tous et toutes,
J'ai fait une recherche sur le forum, mais je n'arrive à trouver ce que je recherche...
Pour le nouveau MOC que j'aimerais faire, j'aimerais un système autonome pour réaliser 3 mouvements séquentiels... Je m'explique, dans l'ordre, j'aimerais faire descendre un élément, quand il touche le sol il doit s'arrêter et lancer la descente d'un autre élément, qui une fois descendu s'arrête et doit enclencher un mouvement de translation horizontale. C'est la première phase de mon projet...
Puis le dernier élément descendu doit remonter et faire remonter le premier... easy lol...
En deux mots est-ce réaliste avec un moteur et plein de mécanismes ou je dois passer par la solution mindstorms qui va encore me couter un automate ?
J'ai regardé différentes choses : différentiels, la bobineuse de fil de Nico71, mais je n'arrive pas a voir comment implémenter cela pour ce que je veux faire...
Merci à vous, si vous avez des idées... Je vous rembourserai peut être le prix de l'automate lol
Eric
Mouvements séquentiels autonomes
9 messages
• Page 1 sur 1
|
Avec des cames et des pistons à ressorts ? (genre comme pour les soupapes de moteur)
.gif ":)") La plus grosse difficulté dans la création, ce n'est pas de faire quelque chose qui n'existe pas, mais de faire quelque chose qui peut exister.
Mes créations lego |



|
Bon, peut etre facile à dire en théorie, mais si ton séquencement est :
mouvement1 mouvement2 mouvement3 mouvement1inverse mouvement2inverse mouvement3inverse Avec des différentiels tu dois t'en sortir sans grande difficulté, reste à voir la force à utiliser pour chaque action, est-elle identique ? Si oui, le premier mouvement est libre, le deuxieme avec un pin à friction sur une roue dentée, le trousieme avec un pin à friction 3L sur une roue dentée, Ainsi ca te fait : moteur --> driving ring (BV) --> différentiel1 différentiel1 - sortie1 = mouvement1 (une roue dentée avec une crémaillère si je comprends ce que tu veux). - sortie2 vers différentiel2 avec une roue dentée en prise sur l'arbre les joignant qui est en prise avec une roue dentée sur un pin à firction différentiel2 - sortie1 = mouvement2 (une roue dentée avec une crémaillère si je comprends ce que tu veux). - sortie2 vers mouvement3 avec une roue dentée en prise sur l'arbre les joignant qui est en prise avec une roue dentée sur un pin 3L à firction (donc plus de friction de celui d'avant) Enfin une fois que tu arrives en butée du mouvement 3 tu actionnes le driving ring pour inverser le sens de rotation En fonction de la force dont tu as besoin pour tes mouvement, les pin à friction ca risque de saccader, pour avoir quelque chose de plus lisse, tu peux utiliser un poids à entraîner (des roues de camion technic feront l'affaire) Une fois que tu auras fait cela, il ne te reste plus qu'à faire du GBC! A toi de jouer |

|
Logique Pneumatique
 et en plus tu as la classe internationale avec ! l'idée, tu as un vérin qui pousse une fonction, quand il arrive en buté, il force le switch du vérin N°2, etc... etc... 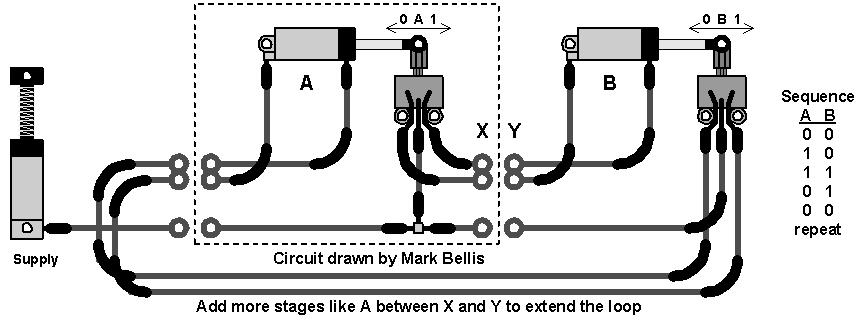 Plus d'info, Merci Mark Bellis : http://www.brickshelf.com/cgi-bin/gallery.cgi?f=141478 http://www.brickshelf.com/cgi-bin/gallery.cgi?m=BUZ
Aménagement de Garage en cours |



|
Merci pour toutes vos idées, j'ai de quoi faire...
Bon maintenant avec cela je peux réfléchir plus facilement... Cela ne va pas être simple, je n'ai pas tout dit lol... Le deuxième mouvement, ce seront deux charges qui vont descendre mais à des hauteurs différentes en fonction de quelque chose, je pensais déjà mettre un différentiel là... Par contre, je n'ai pas pensé à mettre des roues à friction pour que les sorties du différentiel ne s'activent pas toute de suite... Bon je vais me creuser la tête, en tout cas merci beaucoup, cela me fait avancer ! Eric |
|
Hé! J'ai peu être même une solution encore plus simple ! J'ai jamais pensé à utiliser ce principe en GBC mais ca va me servir.
Si ce dont tu as besoin c'est d’actionner des mouvements les un après les autres, il te faut juste du délai entre les actions. Pour cela tu peux prendre des extenions de driving ring successives. Tu remarques qu'avant d'être en prise l'axe tourne dans le vide, donc tu as du délai sur une rotation. Plus tu mettras d'extension plus tu auras de délai. mouvement1 : en prise direct avec un clutch pour la fin de course mouvement2 : x driving ring en fonction du délai à ajouter par rapport à la première fonction avec un clutch pour la fin de course mouvement3 : y driving ring en fonction du délai à ajouter par rapport à la première + la deuxième fonction. En fin de course tu actionnes la BV en sortie de moteur pour inverser le sens C'est compact et je pense que tu auras moins de problème de couple qu'avec des différentiels Si tu as compris l'idée, je pense que c'est canon à faire Pour la solution de Buzz, je dirai que le pneumatic c'est fantastique :-) |
|
Tu peux aussi utiliser des switch pfs. La mise en butée d'un mouvement vient commander le switch du prochain mouvement et ainsi de suite.
La difficulté est au niveau des butées, ne bien gérer le point mort pour pas que les moteurs ne tournent si ce n'est pas nécessaire. Tu peux utiliser un ressort pour gérer la position bistable du switch et une fourchette qui vient l'immobiliser en position intermédiaire. La solution de la logique séquentielle pneumatique reste le plus simple. A toi de faire en sorte que les mouvements soient commandés avec la course du vérins, donc à gérer mécaniquement en fonction de la hauteur comme tu dis. |





|
Le pneumatique c'est la vie ...
http://www.brickshelf.com/cgi-bin/gallery.cgi?m=BUZ
Aménagement de Garage en cours |
|
En travaillant sur un MOC j'ai remarqué par hasard que tu peux aussi utiliser des LAs.
Le LA est rentré. On tourne l'axe dans le sens qui le fait sortir. La tête reste droite et le LA s'étend. Quand il arrive en bout de course, si la tête n'est pas maintenue, elle tourne. Pareil quand le LA rentre. Tu dois pouvoir utiliser ce principe pour faire des mouvements suivis autonomes. EDIT : en fait ça ne marche qu'avec les mini LAs et il faut que ce soit la tige qui entraine l'entrée du vérin et non l'inverse. La théorie, c'est quand on sait tout et que rien ne fonctionne. La pratique, c'est quand tout fonctionne et que personne ne sait pourquoi.
|


9 messages
• Page 1 sur 1
Retourner vers De la théorie à la pratique
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 13 invités