à tous !
à tous !Cela fait plusieurs années que je suis sur un engin de préhension . Les tous premiers essais remontent il y a plus de vingt ans
 . A l'époque c'était un "quad" surmonté d'une pince 3 axes , quand j'y repense mdr
. A l'époque c'était un "quad" surmonté d'une pince 3 axes , quand j'y repense mdr  .
. Mon engin n'a fait qu'évoluer et encore maintenant , je ne sais plus combien de versions j'en ai fait ( j'ai arrêté de compter je n'avais plus assez de doigts
) . L'arrivée des studless et internet ( depuis peu ) ont fait passer mon engin en mode "XL" . Je sais maintenant que je ne suis pas le seul à faire joujou , autant en faire profiter tout le monde et le présenter .gif ";)") .
.Donc voilà pour la petite histoire .
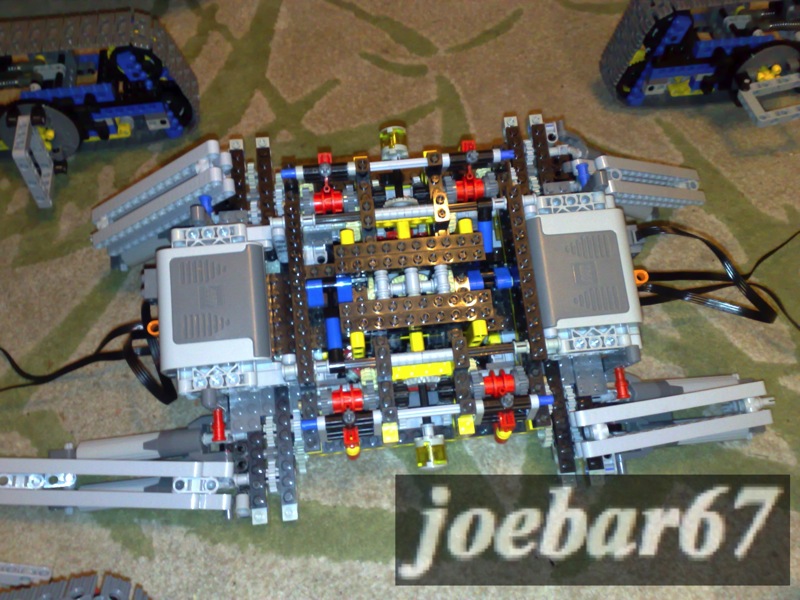
Maintenant place au MOC . Comme déjà évoqué précédemment , c'est un hybride et il n'y a pas d'équivalent ( peut être un robot de déminage et encore ) . La partie du châssis et de la tourelle sont assimilés aux grues de levage ; la partie supérieure , le bras est en fait inspiré de la robotique industrielle .


Voilà les photos qu'il me reste car il est déjà en refonte .
Et voici quelles photos du bras en cours .



Le poignet a quasiment entièrement été revu et la pince repasse en pneu .






Le bras est télescopique avec au bout un système pneu ( je ne sais pas s'il va rester
 ) ; le poignet ( 3 axes ) ; et la pince avec son vérin qui traverse la table tournante .
) ; le poignet ( 3 axes ) ; et la pince avec son vérin qui traverse la table tournante .La télécopie est quant à elle le même principe que le 8421 avec une astuce au niveau de la crémaillère . La vis sans fin se déplace sur un axe de 32 tenons ( petit clin d'oeil pour la vis sans fin de l'usine Airbus en légo
dans je ne sais plus quel topic ) ; qui fait déplacer un chariot rouge que l'on voit sur les premières photos .Et la suite à venir ...






 .
.
 .
.  mais avec le 8258 ( MOD qui va bientôt partir en démontage ) je compte bien résoudre ce petit soucis .
mais avec le 8258 ( MOD qui va bientôt partir en démontage ) je compte bien résoudre ce petit soucis . .
. .
.

.gif ":)") et fait nous une video
et fait nous une video  ( pour m'en servir autre part
( pour m'en servir autre part